
16.Defects
坏点检测,亮暗环境全天候识别
Definition:
相同的光照条件下,如果一个pixel与相邻像素的差值大于或小于阈值,则定义此像素为defect pixel。
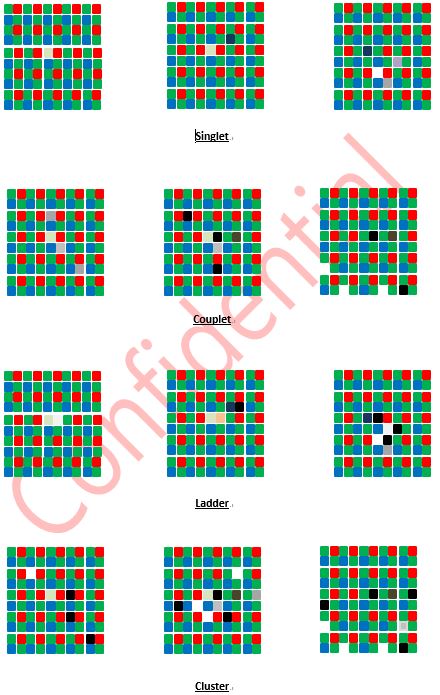
Singlet: 在相同的color chanel中,无相邻defect pixel的独立defect pixel,定义为siglet。
Couplet: 相同的color channel中,相邻的两个defect pixel,且周围无第三个defect pixel与其相邻,定义为couplet。
Ladder: 整帧图像中,同一行中相邻但不同channel的两个相邻defect pixel,定义为ladder。
Cluster: 相同channel中,三个或三个以上相邻的defect pixel定义为cluster。
列如:
测试准备条件
使用上节SET1及SET5中的实验方法正确搭建拍照环境,拍摄所需图片。实验室测试中,仅使用SET1中D50色温即可。
需注意测试目标需要是加diffuser的透射式flat field光源或类似设备,此实验中不可使用反射式灰卡。
Light condition:
Defect pixel: 在相同的color channel中,若一个pixel与相邻5×5 像素均值(不包括待测pixel)的差值超过x%,则定义该pixel为 defect pixel。
Dark condition:
Defect pixel: 在相同的color channel中,若一个pixel与相邻5×5 像素均值(不包括待测pixel)的差值超过x DN (10bit),则定义该pixel为 defect pixel。
Defect row: 在相同的color channel中,若某row与相邻4 rows(以待测row为中心每侧2 rows)均值的差值超过x DN (10bit),则定义该row为 defect row。
Defect column: 在相同的color channel中,若某column与相邻4 columns(以待测column为中心每侧2 columns)均值的差值超过x DN (10bit),则定义该column为 defect column。
Specification limit:
| Defect type | Limits with DPC off | Limits with DPC on | Comments |
| Singlets | 1000 or TBD | 0 | Mapped defect correction is on if equipped. |
| Couplets | 0 | 0 | |
| Clusters | 0 | 0 | |
| Defect rows | 0 | 0 | |
| Defect columns | 0 | 0 |